Robot-Camera-Robot Calibration / Localization
Pose estimation, calibration, testing and validation pipeline 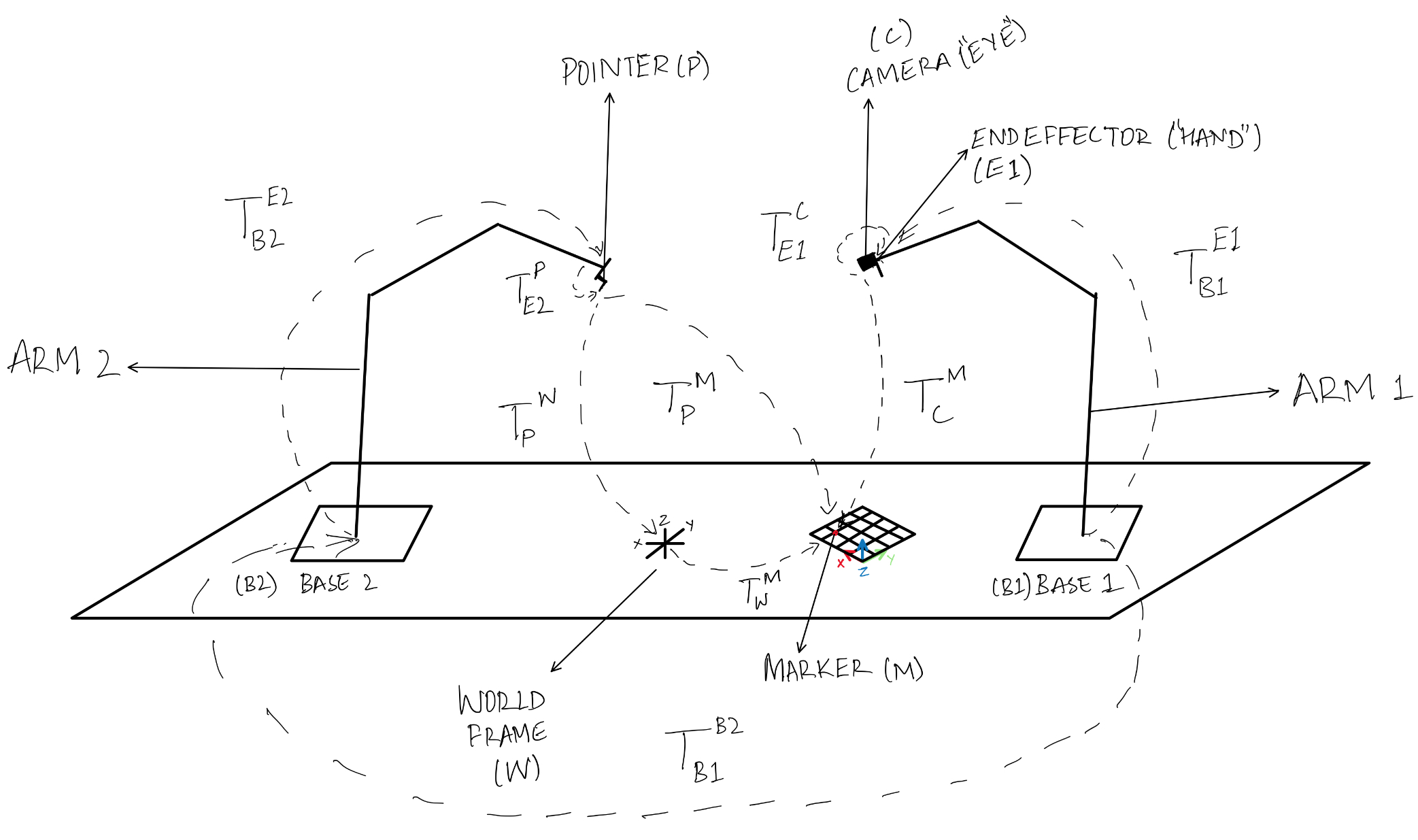

Pose estimation, calibration, testing and validation pipeline
How to find the camera’s pose relative to the robot? 
ROS multi-arm setup using URDFs and rqt 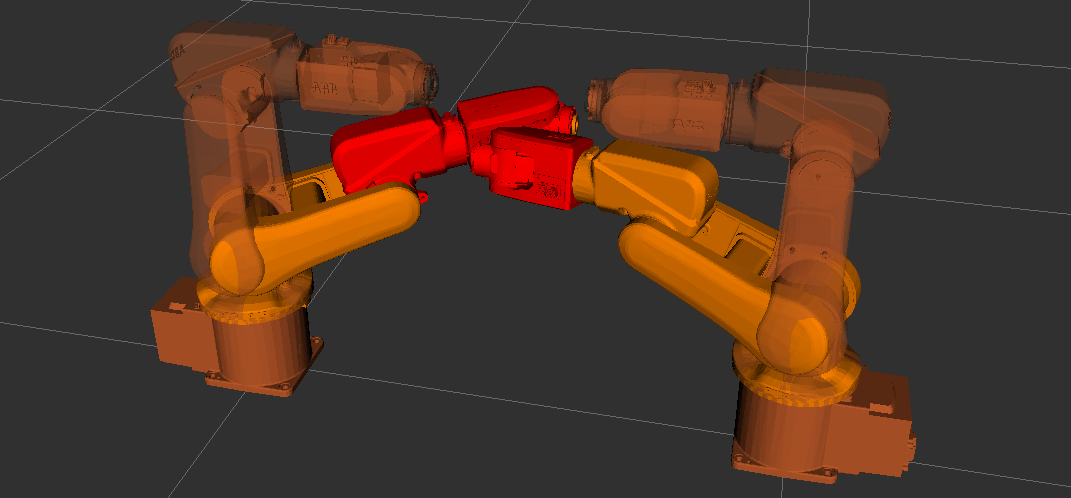
Our Model Rocket 
Piezoelectric Energy Harvester using Kármán Vortex @Re 200 
Aircraft flying a banner 
Test Aircraft